Project Info:
The MIT Distributed Robotics Laboratory writes novel autonomous vehicle(AV) control software within the Toyota-CSAIL joint research center. In order to test their novel trajectory prediction algorithms, the lab needs baseline metrics to compare against. However, many trajectory prediction papers online lack code, and therefore cannot be used as a comparison point.
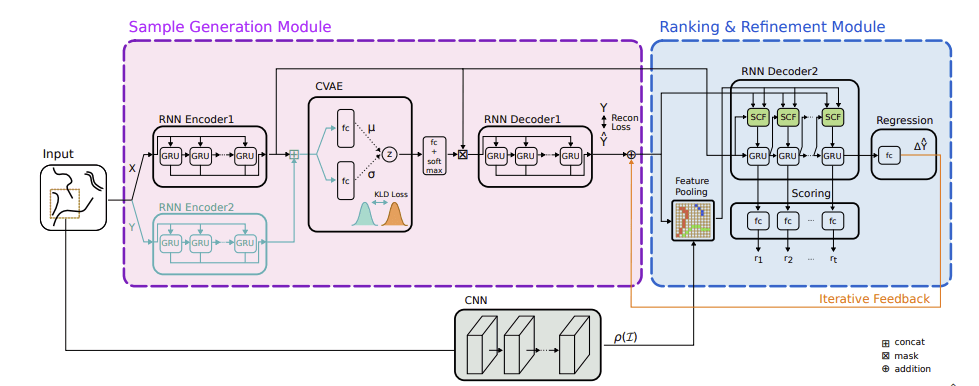
I implemented the trajectory prediction algorithm introduced in the paper DESIRE: Distant Future Prediction in Dynamic Scenes with Interacting Agents from scratch in Pytorch. Doing so involves writing CNN, GRU (RNN), CVAE, and Social Pooling modules, followed by hyperparameter optimization of the modules to optimize performance. I also wrote data preprocessing code in NumPy.
In addition to my implementation work, I also participated in a weekly reading group in which we read current literature in the trajectory prediction field. As a result, I'm not familiar with many trajectory prediction techniques, and hope to soon implement ideas of my own.